オープンイノベーション【オープンイノベーション】vol.17:列車搭載版GNSS-BeatBox®の開発(ZED-F9Rを用いた自立航法・2周波RTK-GNSS)と結果

次期GNSS-BeatBox®の開発
列車搭載版GNSS-BeatBox®の開発コンセプト
SBC(Raspi)本体にGNSSセンサー(ZED-F9R)を内蔵して、本体だけで自立航法や2周波RTKに対応できるアプライアンスとして、"列車搭載版GNSS-BeatBox®"を計画しました。新たな機能として、IMU(慣性制御ユニット)による自立航法への対応と、RTK-LIBによるRTK測位、距離センサー 振動センサー(3軸加速度センサー)の入力をロギングできるようにします。
これまで、自律航法に対応したGNSS-BeatBox®は、【オープンイノベーション】vol.6:自律航法GPSを使った業務用カーナビ(/future/open-innovation-meeting/openinnovation_vol6_Dead_Reckoning_GPS.html)で紹介しているように、古野電気のPT-G1を用いて、車からの信号を元に自立航法を実現していました。
しかし、車専用であり、鉄道系のお客様の"列車の位置を取得する"用途には使えないものでした。
そこで、IMUで角速度などからトンネル内や駅構内でも位置が取得できたり、2周波RTKによって"上り/下り、複線など走行している軌道の間隔"の精度を得られるような自立航法&RTK測位のGNSS-BeatBox®の開発をスタートしました。
開発機
正面

背面

自立航法への対応
車のセンサーを利用しない自立航法の実現のため、ZED-F9RというGNSS受信機のIMU自立航法に着目しました。
実はZED-F9Rでも、車への実装を想定したもののようですが、IMU(位置制御装置=多軸加速度センサー)によって、XYZの姿勢(角度)と角速度を元に走行した方向と移動距離を測れれば、「"全くのデタラメではない程度"の自律測位が可能ではないか?」と考えました。
ZED-F9Rによる自律航法の結果
下記の赤色が自律航法(DeadReckoning)による軌跡、トンネル内部であり得ない円を描く。拾えている部分ある。(直線が続く場合)
緑色はGNSSの軌跡。正確に走行軌跡を描いている。
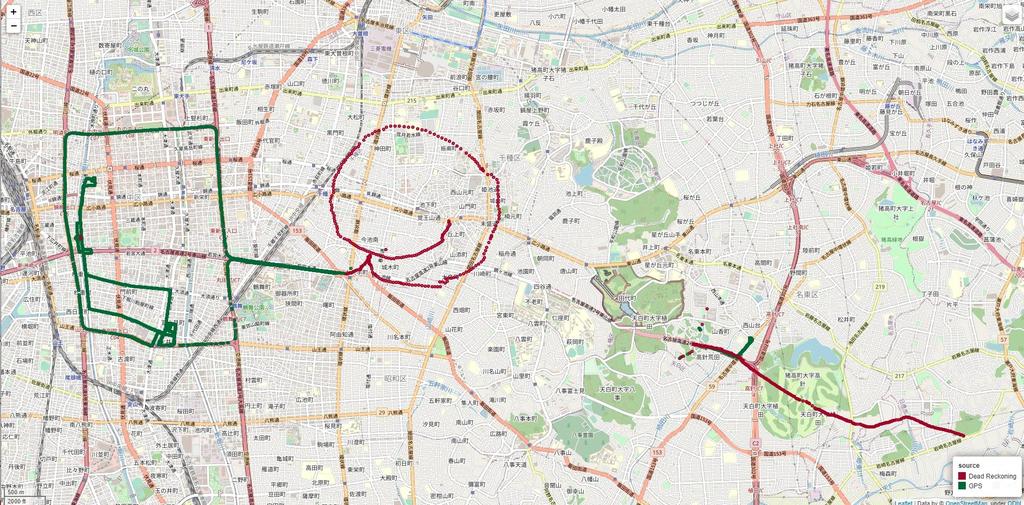
ZED-F9R本体以外を使わない自律航法で良い結果は得られませんでした。
RTKへの対応
Ichimilなどの商用サービスを用いない2周波RTKを実現するため、RTKLibの採用を検討しました。
Wi-Fiルータ経由でインターネット上の公開基地局情報を取得することで、特定の基地局情報を用いたRTKが可能になります。
※移動しながら、適切な基地局にローミングしていくような賢い機能はありません。(特定の基地局がカバーする10Km程度の範囲内でのRTKに限定されます)
センサー情報の追加
車や列車で走行している最中の、道路や軌道の振動をロギングするため、各種センサーの追加を行いました。
IMUとは別で、3軸加速度センサーを取り付け、振動を捉えるセンサーとして機能させます。また、撮影対象との離隔距離を測るために、距離センサを追加します。
道路であればジョイント部やわだちにより路面の凹凸に伴う振動(音)の情報、軌道であればレールの継ぎ目の情報を取得できるはずです。
その時点の画像と位置情報とセンサーの値があれば、より状態を的確にとらえることが出来ると仮定しています。
応用としては、映像の字幕情報として、これらのセンサーが取得した値や、乗り心地に関する情報をオーバーレイすることで、映像に対する付加価値を実現できます。
センサーとケーブル

レーテンシーの向上
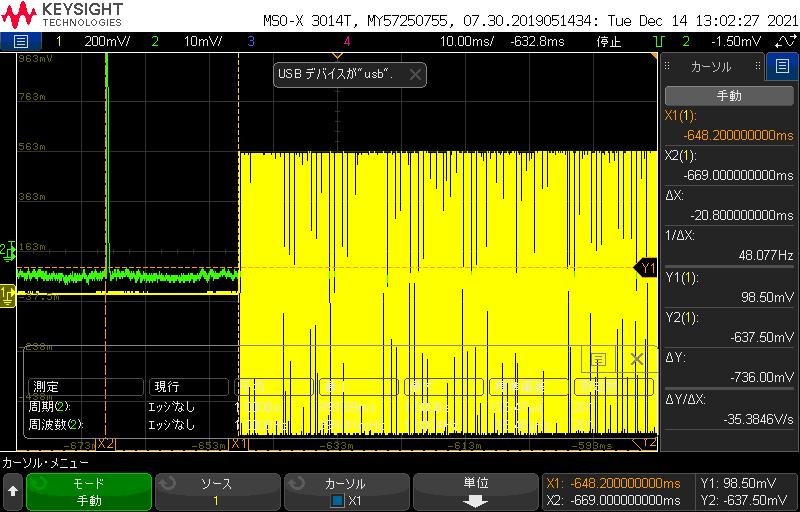
Radpi内蔵のオーディオはノイズが多く乗っていたり、レーテンシーが大きい(60ms)ので、最近、ハイレゾオーディオなどで脚光を浴びている、USB外付けDACを採用してみます。
結果は、「レーテンシーが20ms程度に向上し、S/Nも良い音声となりました。」
外付けUSBオーディオ:20ms
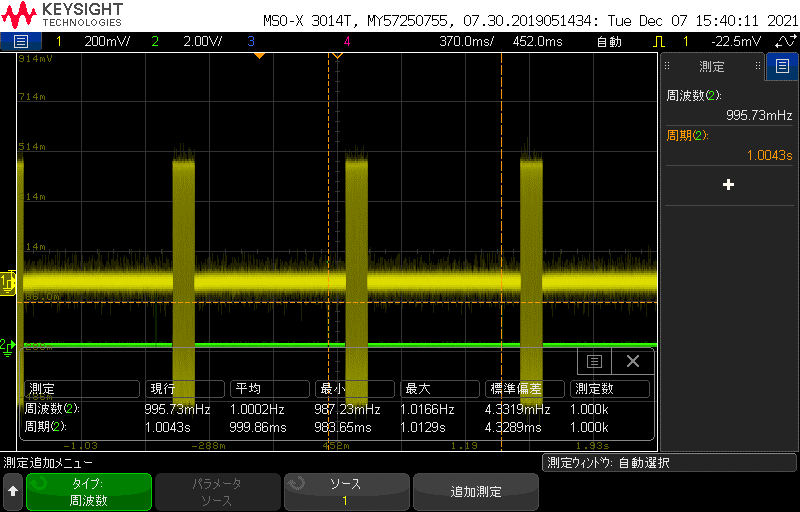
正確に1秒間隔をキープ
結論:
IMUによる自立航法と2周波RTKで位置情報を補足し、加速度センサー、離隔距離センサの入力・記録が可能な"列車搭載版GNSS-BeatBox®"は2021/12に完成しました。
外付けDAC(デジタルオーディオ)を採用してレーテンシーが向上しましたが、ZED-F9Rの自律航法は列車の軌跡を正しくトレース出来るものにはなりませんでした。
▼この記事を書いたひと
R&Dセンター 長尾 賢志
Pythonistaですが、Java、C#、Rubyなども経験があり、オブジェクト指向を得意とします。Djangoを使用したWeb開発をしたことがあるほか、データ解析・可視化なども行なっています。R&Dセンターではエッジコンピューティング、IoT関連を担当しています。保有資格:ソフトウェア開発技術者
お問い合わせ
ご意見・ご質問などお気軽にお問い合わせ下さい。ナカシャクリエイテブ株式会社
●富士見事務所 TEL : 052-228-8744(交通部営業課) FAX : 052-323-3337(交通部共通)
〒460-0014 愛知県名古屋市中区富士見町13−22 ファミール富士見711 地図
PoCのお問い合わせ:交通部営業課
技術的なお問い合わせ:R&Dセンター



![]()

![]()