オープンイノベーション【オープンイノベーション】vol.18:GNSS-BeatBox®実用化プロトタイプのご紹介
新連携支援事業2年目で開発した"列車搭載版GNSS-BeatBox®"をベースに、顧客へ貸し出す想定の実用化プロトタイプを開発しました(2022年3月~8月で開発)。企画:ナカシャクリエイテブ、設計・開発は、株式会社コア(中部カンパニー&エンベデッドソリューションカンパニー)です。
GNSS-BeatBox®実用化プロトタイプ
改良点(要件)
これまでのGNSS-BeatBoxは、DIY感丸出しの構成で、携行性が無く、取扱いが面倒で、"自分達が使うツール"として「色々と試す」自由度を優先した作りになっていました。
今回の開発では、下記の項目の追加によって、顧客自らが取り扱う想定で、よりユーザフレンドリーになりました。
・専用筐体の採用
・タッチパネルでGUIの具備
・GNSSの内蔵(株式会社コア製 Cohac∞ QZNEO R、Cohac Tenのいずれか)
・電源内蔵、追加電源で連続稼働時間延長
・ガイダンスの具備
・エラー時のデバッグ情報の保存
構成
・ケース:タカチ電機工業製PF24-6-16 W:240xD:165xH:50
・ディスプレイ:本体一体型7インチタッチパネル EVICV
・GNSSセンサー:QZNEO RまたはCohacTenの基盤を内蔵
・SBC:Asus TinkerBoard S R2
CPU:Rockchip Quad-Core RK3288-CG.W processor
RAM:2GB Dual Channel DDR3
OS:Debian
OS起動メディア:microSD
・内蔵バッテリー:USB PD20W 10000mA HD-PD20W10000BTBK(磁気研究所)
・加速度センサ:Seeed IMU9D0F V2(I2Cハブ接続)
・距離センサ:秋月電子 AE-VL53L1X(I2Cハブ接続)
・DAC:Dukabel USB外付けサウンドカード・オーディオインタフェース
・外部端子:USB2.0x1(メモリ用)、USB
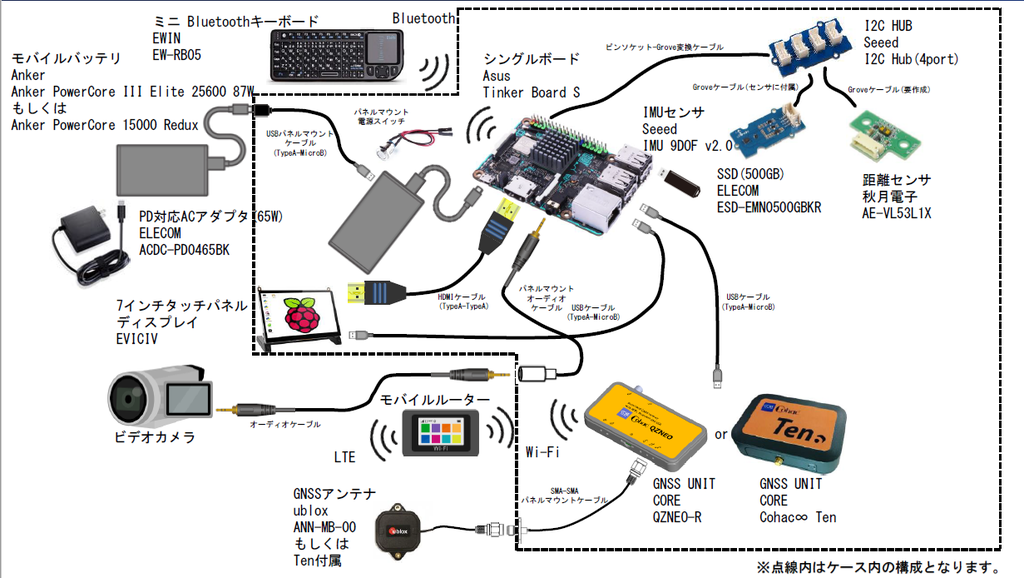
機器構成図
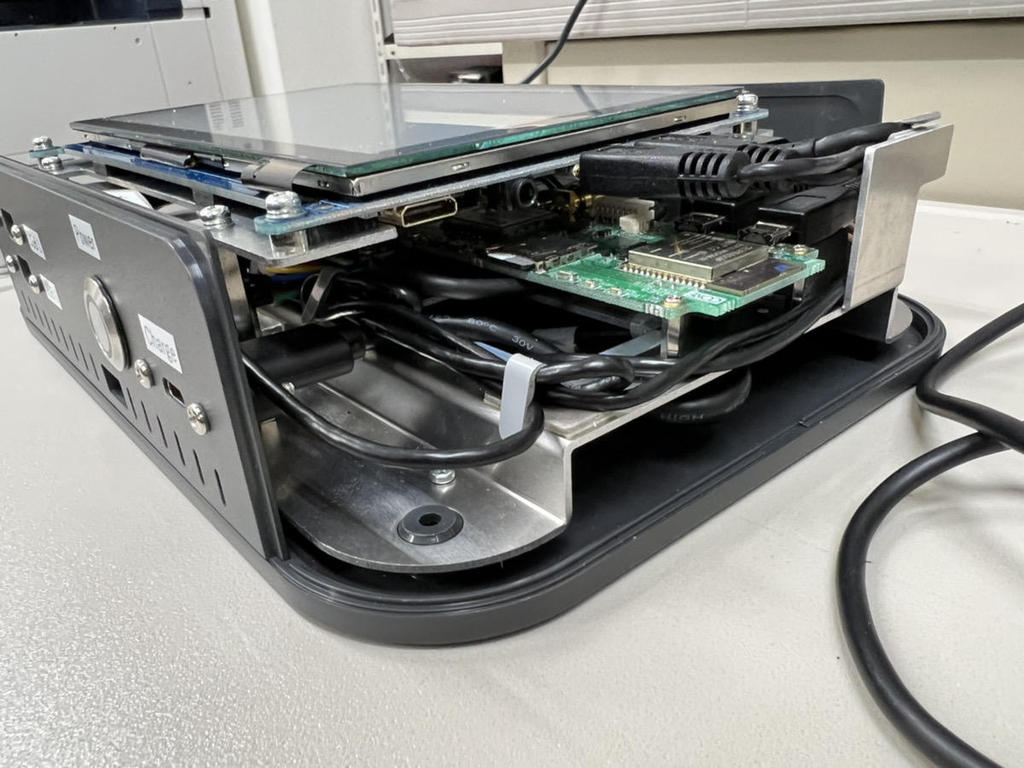
ケース取り外し(3D-CAD)
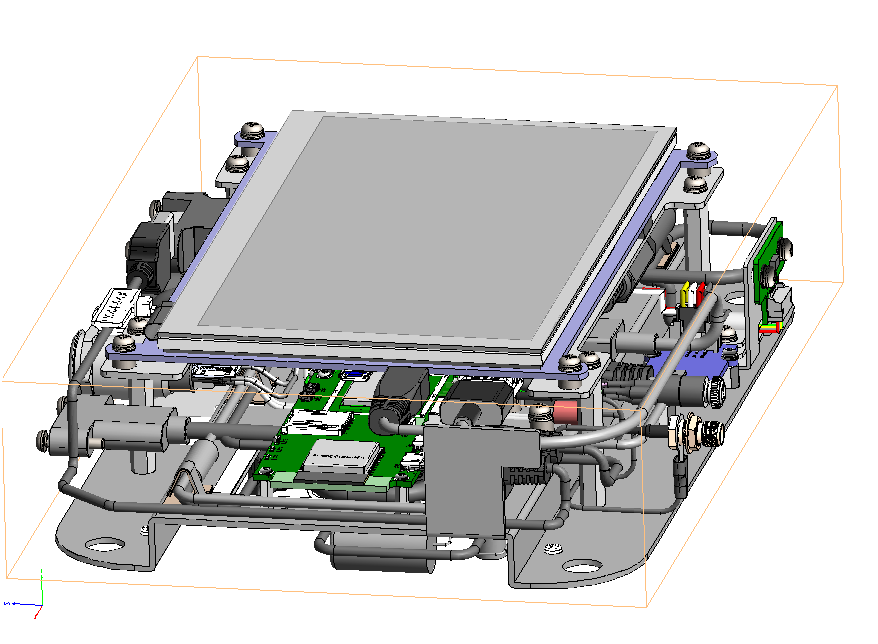
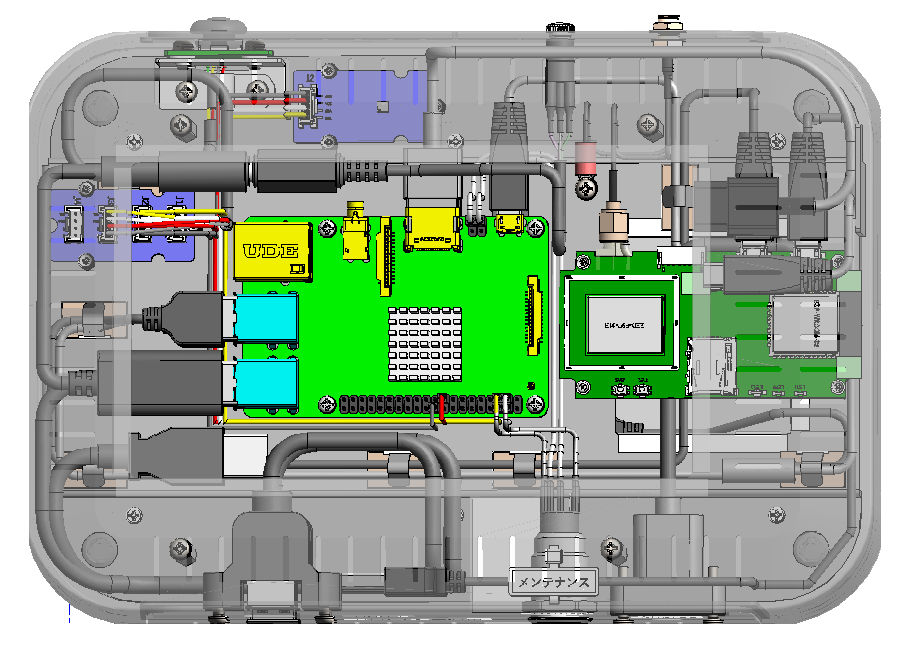
筐体内レイアウト(3D-CAD、タッチパネル非表示)
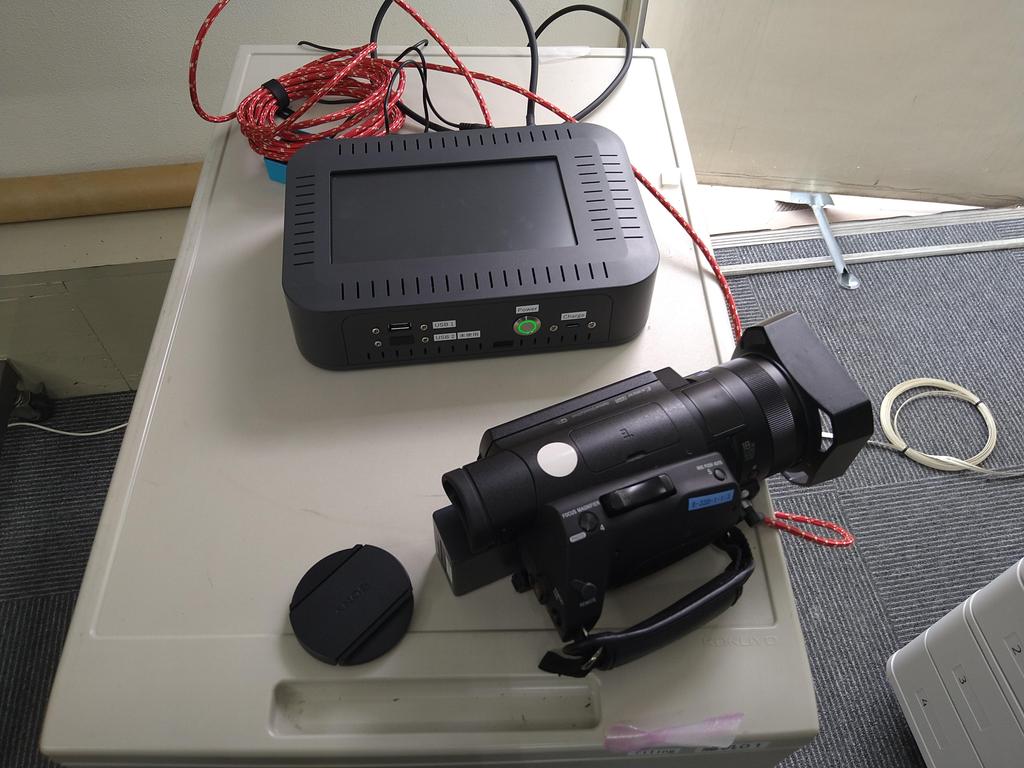
本体一式(本体、GNSSアンテナ、PDアダプタ、アダプタケーブル、セカンドバッテリー)

ケース取り外し

タッチパネル液晶

GNSS受信機(基盤)
底面主電源スイッチ

仕様
・GNSS受信機(QZNEO R,またはCohacTen)内蔵、ネットワークRTK対応
・振動センサ、距離センサ内蔵
・バッテリー内蔵で二時間動作すること
・7インチタッチパネルUIで操作できること
・同期音声出力が出来ること(GV-Syncで復元できること)
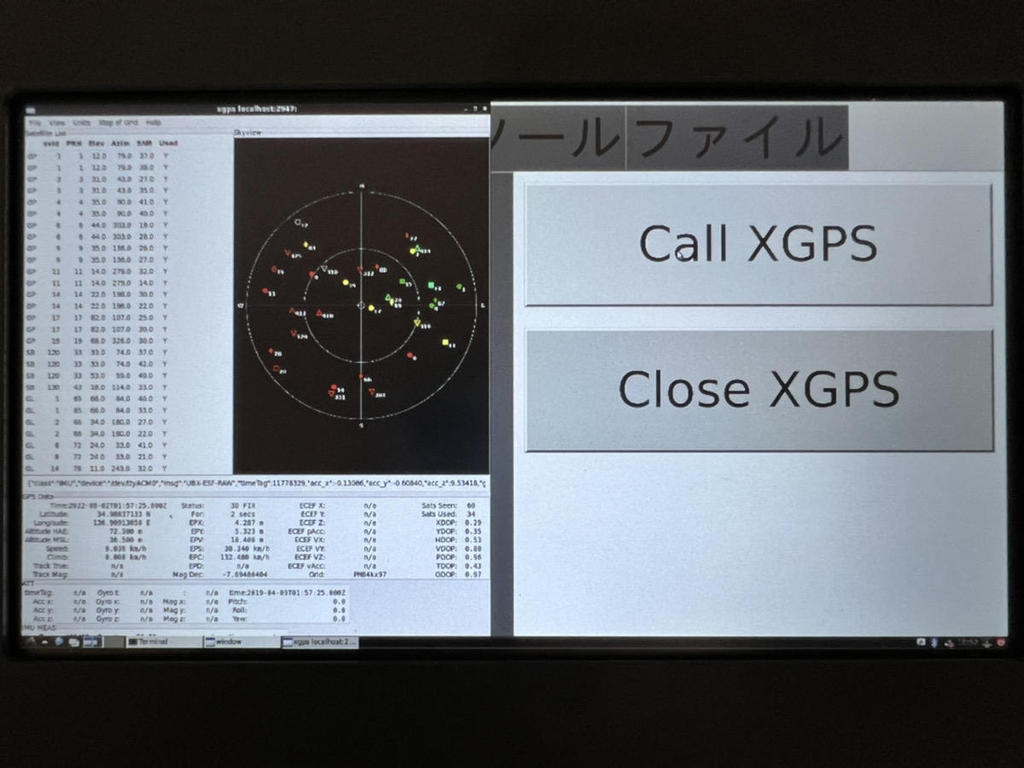
・衛星FIX状態のリアルタイム表示、衛星位置の確認(x-gps)
・USBメモリへのログの書き込み
・ユーザ定義任意キー入力機能(最大5つまで)
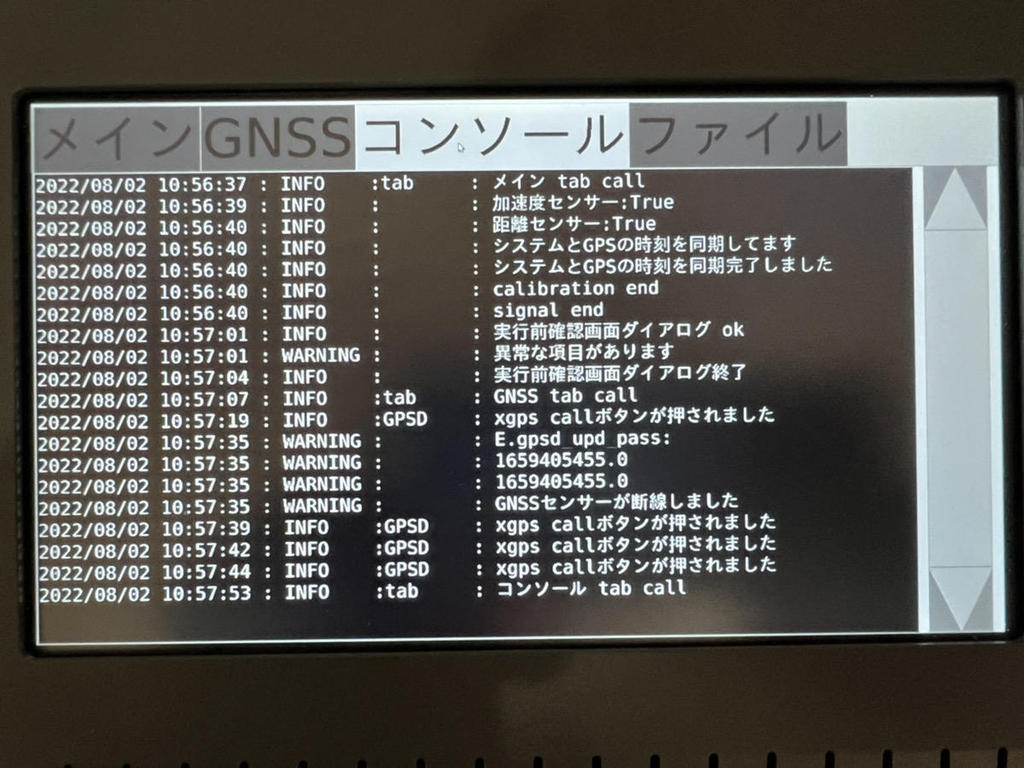
・不具合発生時のエラーログ取得
・GUI上からの不要ログ削除
操作手順
・GNSSアンテナの接続
・USBメモリの装着
・電源ON
・時刻確認(本体時刻をGNSS受信時刻に合わせる)
・衛星受信確認(FIXモードが表示される)
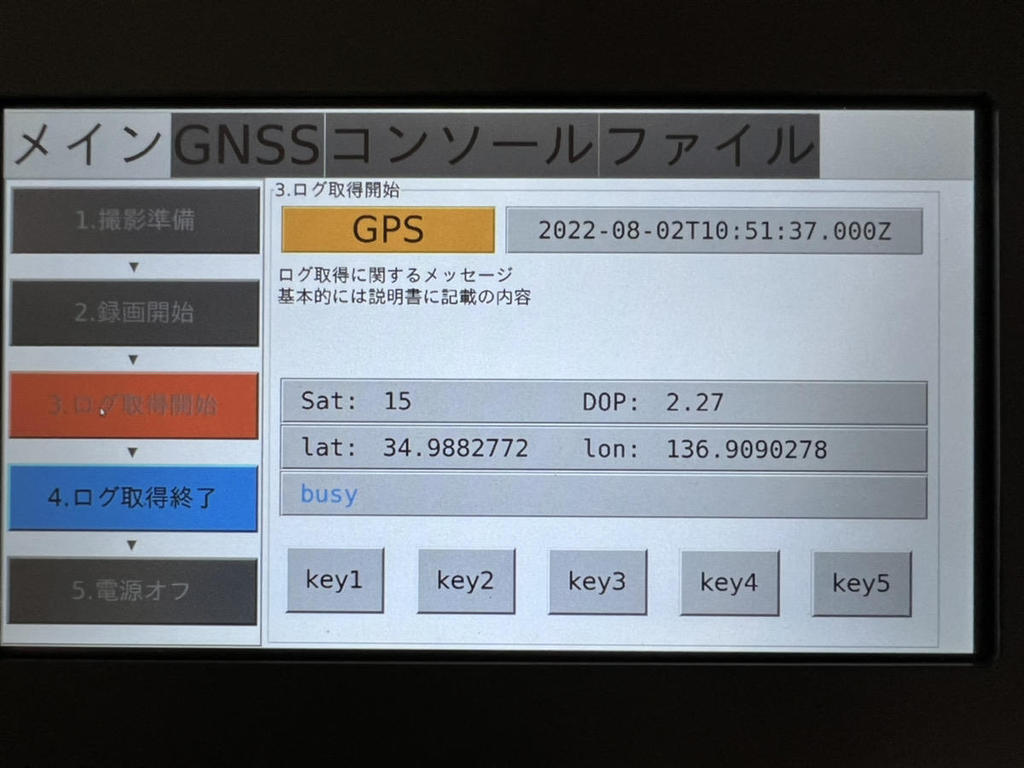
・ロギング開始指示
・カメラの録画ボタンをON
・ロギング中:緯度経度表示、FIXモードの確認
・ロギング停止指示
・カメラの録画停止
・ログ保存確認
・終了
・本体電源OFF後、USBメモリ取り出し ・(本体の待機電流をOFFにする場合は、本体底面のボタンを二度押しして完全停止)
起動時セルフチェック

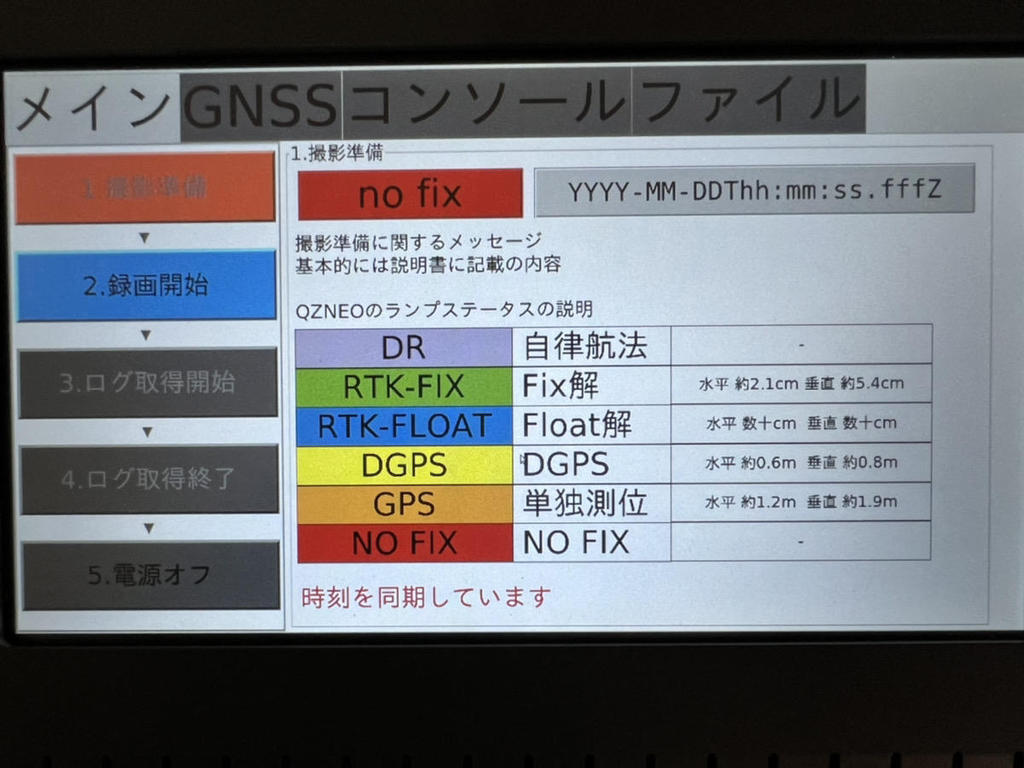
操作手順説明(ガイダンス)
衛星受信状況確認(X-GPS起動)
メイン画面
操作履歴
GPXファイル一覧

GNSS-BeatBox®実用化プロトタイプのテスト
GNSSロギング
実際にGNSS-BeatBox実用化プロトタイプを使って、車載撮影を行った際の走行軌跡です。
高い精度で計測できていることを確認できます。(後述のGPXログから、RTK-FIXの精度で記録できていることを確認できます。)

GPXログ
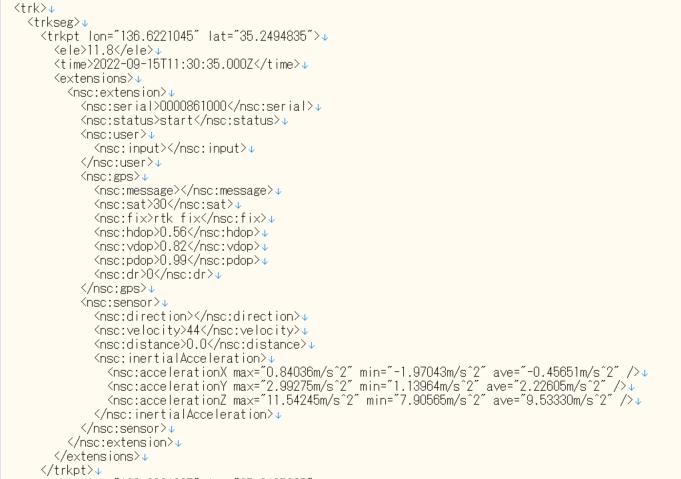
GNSS-BeatBoxが記録するGPXデータ(GPX1.1拡張フォーマット)の例です。
同期シリアルやステータス、精度情報、加速度(振動)の情報が記載されていることを確認できます。
また、最も計測精度の高い、RTK-FIXの精度で受信できていることが確認できます。
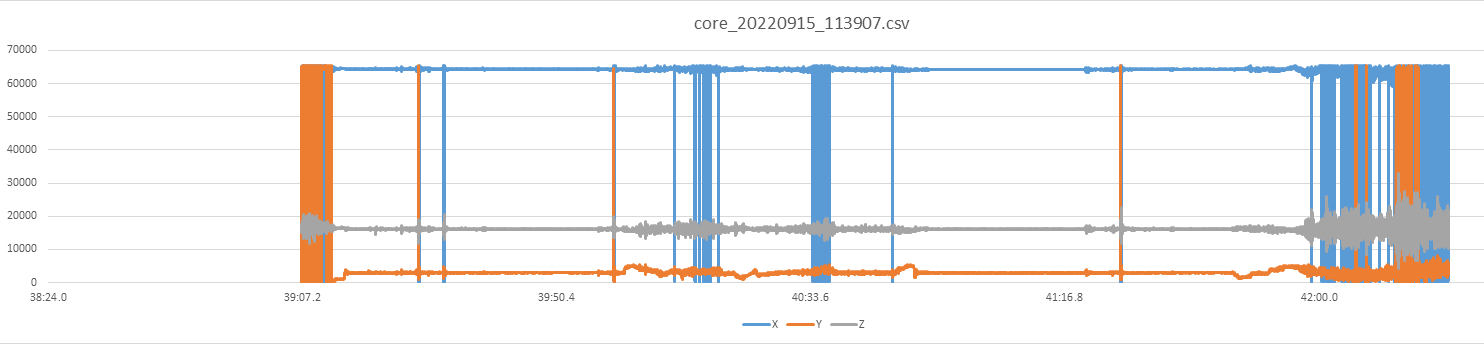
Gセンサーロギング
加速度センサー(振動センサー)のcsvファイルをExcelでグラフにしたものを示します。
結論:
手順に従って、タッチパネルを数回タッチするだけで、GNSSのロギング、同期音声出力が簡単にできます。
GNSS受信精度や衛星の配置状況をグラフィカルに確認できます。
GNSS-BeatBox®実用化プロトタイプの残課題
QZNEO Rによる自立航法精度
QZNEO Rの自立航法精度を評価できていません。(前回までの知見から、直線部以外は精度が出ないことは分かっています)
実際にどの程度の精度でロギングできるのか?やどういった場合に良い・悪いを把握しようと思います。
センサーロギング
・キャリブレーション
本実用化プロトタイプでは、センサーをハードウェア的に実装した状態で、加速度、重力センサーのキャリブレーションがされておらず、かつどの程度実用的に使えるのかを未検証です。(将来機能として準備した段階です)
・評価
センサー値は、解析によって、誤差範囲の把握や、拾いたい振動の周期、正常異常の閾値の発見など、利用目的に応じた調整が必須ですので、衝撃を拾いたいのか、本機の揺れを記録したいのか、センサーのみを本体から外出しして、路面や軌道の微妙な状態をセンシングしたいのかで全く異なるアプローチや課題があることと思います。
・センサーの外出し
センサーを本機から離して設置する場合の、I2Cセンサーのケーブル延長、ノイズ対策(フォトカプラの利用?)、センサー固定治具の設計など、車両の振動計測などに使う場合に考えなければいけないことがたくさんあります。
出来れば、センサー計測を専門にやられている会社様との協業で実現していきたいところです。
電源シーケンス
現在、セカンドバッテリーは、システムを一度落とさないと正常に認識していません。活性状態でシームレスに給電できるようにするためには、電源回路の新設や、外部バッテリーの制御シーケンスと連動しなければなりません。
▼この記事を書いたひと
R&Dセンター 長尾 賢志
Pythonでデータ解析・可視化、SwiftUIで簡単なiOSアプリ作成、Dockerでハードに依存しない環境を構築、AWSでコスト最適化のトライ、などをしています。保有資格:ソフトウェア開発技術者
お問い合わせ
ご意見・ご質問などお気軽にお問い合わせ下さい。ナカシャクリエイテブ株式会社
●富士見事務所 TEL : 052-228-8744(交通部営業課) FAX : 052-323-3337(交通部共通)
〒460-0014 愛知県名古屋市中区富士見町13−22 ファミール富士見711 地図
PoCのお問い合わせ:交通部営業課
技術的なお問い合わせ:R&Dセンター



![]()

![]()