【エッジAI】Raspi5+SONY IMX500で30FPS枕木検出チャレンジ!~鉄道技術展2025デモ編 vol.25

【エッジAI】Raspi+SONY IMX500で30FPS物体検出チャレンジ!~オリジナルモデル、静止画・ログ保存編 vol.24
https://www.nakasha.co.jp/future/ai/vol24_raspi5_imx500_python.html
で紹介したデモシステムを、鉄道技術展2025(2025/11/26-29 幕張メッセ)で展示しました。
「Raspi5で本当に30FPSで物体検出する!」を体感頂き、来場者それぞれにこれらをどのように使えそうかをイメージしていただけたと思いました。
今回の鉄道技術展で披露したチラシやデモをこの記事ではおさらいします。
また、この後にどのようにこのデモシステムを進化させていくのか?についての構想もざっくりお知らせします。
まずは、こちらのデモ動画をご覧ください
デモシステムの構成
エッジAI構成
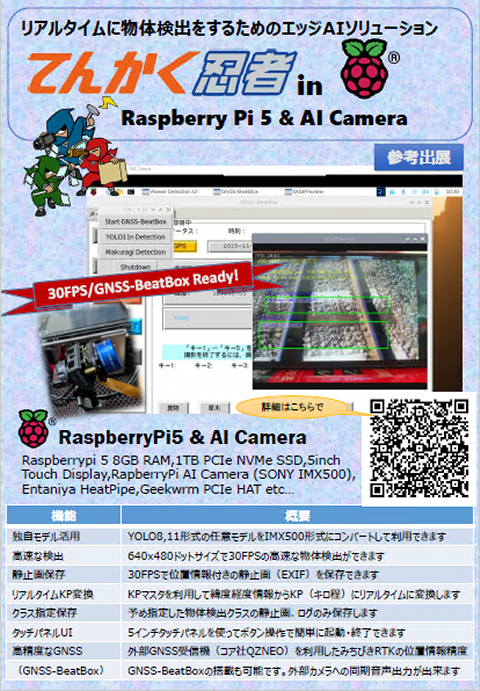
エッジAIシステムの構成(Raspi5、IMX500、ソフトウェア機能)については添付のような仮想製品パンフレット(参考出展のため"仮想")に記載しています。
| エッジAIパンフレット |
 |
デモシステム
デモは、YouTube動画としてアップロードした走行時の軌道映像※をスマートフォンで再生し、これをカメラでリアルタイムに撮像して、弊社オリジナルの枕木検出モデルを使って行いました。
PC側のディスプレイで大きく表示させるために、VNCでRaspiに接続しデスクトップ画面を表示しました。
| デモシステム全景 |
|
動画:走行撮影動画 幾何補正後枕木映像
スマートフォン:Google Pixcel 8a
VNC接続:ノートPCとRaspiをイーサネット接続し、ノートPCからVNC接続
ネット回線:外部Wi-Fiルータによる動画ストリーミング
再生品質:1440の最高品質で再生
※幾何補正枕木映像:走行動画を幾何補正して1画角で6-7本程度の枕木が表示されるように作成。スマートフォンで再生するために1080*1920ピクセルの縦長動画としています。
結果
枕木検出の品質面と運用面の結果をまとめます。
| 枕木をリアルタイムに検出 |
 |
検出の品質
・検出漏れ
PC枕木の検出は得意のようですが、正常な木枕木と損傷木枕木の検出は漏らしている傾向があります。停止時には正常に検出できているように見受けられるため、動画再生時のモーションブラーかAIカメラのシャッタースピードが影響していると考えられます。
・アノテーションずれ
検出結果のアノテーションずれが散見されます。これもYouTube再生時のモーションブラーとシャッタースピードの影響、または撮像と検出結果描画のタイムラグがある可能性があります。
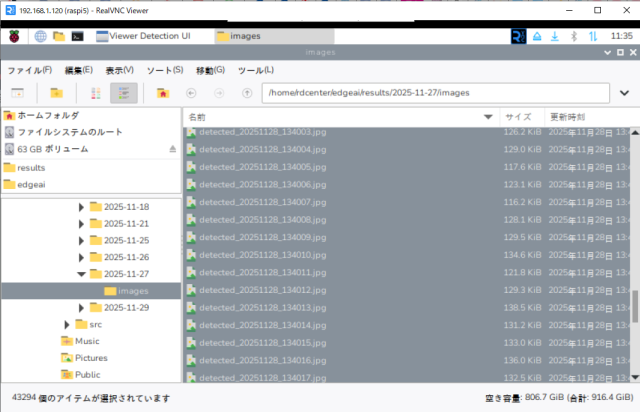
・静止画保存
静止画保存性能はバッチリでした。秒間30フレームの高速な保存が出来ています。
| 4万枚超/日の静止画保存 |
 |
運用の結果
・連続動作
展示会の開始時刻から終了時刻まで無停止で動作し続けました。エラー停止や速度遅延などが発生することなく、安定して動作しました。
この点が今回の最大の成果と感じました。
熱停止の恐れが無いこと、電源変動による誤動作等が無いこと、
・CSIケーブルの破損
展示会現場での荒っぽい扱いにより、展示4日目にCSIケーブルが破損しました。
カメラの根本部分からケーブルが割れました。
3日目終了の格納時にケーブルに無理な力が掛かったものと思われます。
| CSIケーブルの破損 |
 |
来場者されたお客様から頂いたご意見・ヒント
ブースに来場され、リアルタイム検出をご覧になられたお客様からは、下記のようなヒントを頂きました。
・「熊の検出はできるか?」⇒「できます」
・「人が立ち寄れない場所でのロボットの目(損傷個所、異常検出)として使えるか?」⇒「使えます」
・「軌道以外(電気設備)にも使えるか」⇒「使えます」
・「運転士が見つけた異常個所の共有(運転時の支援機能)」⇒検出結果だけをクラウドにリアルタイム転送、画像は後処理で可能
・「リアルタイムキロ程変換は良い」
・「EXIFとログをそのままGISに持っていけるのは良い」
課題と解決方法
上記の結果を受けて、課題は4点となります。
- AIモデルの性能向上
- カメラ性能のチューニング(可能なら)
- イメージ取得とアノテーション描画のタイムラグ解消
- よりタフに扱いやすく
1:AIモデルの性能向上
枕木検出モデルの性能は、PCによる検出においてもPC枕木は90%程度達成できている反面、木枕木や合成枕木、損傷検出の性能がそれほど高くないことが分かっています。
モデルが枕木形状を100%に近い状態で検出できるようにブラッシュアップし、かつPC枕木以外の識別が出来るレベルまでモデル性能を高める必要があります。(それは簡単なことではありませんが、次に述べる"今後の構想"に対しては必須条件です。)
2:カメラ性能のチューニング
シャッタースピード(露出時間)をあらかじめカメラに設定できれば解決できます。
使用しているlibcamera、picamera2などの機能を見直してみます。
3:プログラム内のラグ解消
カメラのイメージ取得と静止画保存は30FPSに対応できていることは、プログラム内のFPS計測結果で分かっています。しかし、アノテーションが画像とずれているということは、映像取得と矩形描画のタイミングに差があることを示しています。
画像取得からアノテーション描画の時間を計測し、30ms以内になっているかどうか?30ms遅れている場合は、一コマ前の画像に対してアノテーションを描画する(1枚分保持して、後の画像に対してアノテーションを描画する)など擬似タイムシフトが可能です。
4:よりタフに扱いやすく
電源、カメラ取り扱い、UIなどを"現場で即、簡単に使える"ようにブラッシュアップする必要があります。列車に持ち込む、ロボットに搭載する、ドローンに搭載する・・これらのためには、カメラ部分の取り回しやすさ(=イーサネット接続)、カメラ増設への対応(2カメラ)とインタフェースをスタート/ストップだけにする、機能を簡略化するなどの手当てが必要です。
TODO(今後の構想)
今回、モデルの性能やアノテーションずれの問題があることは分かりましたが、リアルタイムに検出し続け、長時間稼働できることが分かりました。
ハイスピードな物体検出以外や、シビアに検出精度を求める用途を避ければ十分に使えそうであること(閾値を下げれば良い)が分かってきました。
以前より、夢想していたことですが、ここからが面白いところです。
「リアルタイム設備検出器を作ろう!」です。
具体的には、枕木検出器、レールボンド検出器、架電柱検出器など、設備、部品のデータ収集を行うための現場のクローラです。
精度が甘くても良いとは決して言いませんが、損傷、異常検出を100パーセント精度にするのではなく、リアルタイム性を生かして、"部品の情報を収集する!"、人が目で見て数えられない・・を"高速な機械の目"で代用するコンセプトです。
リアルタイム枕木検出器
・枕木の外形、種別を抽出
・検出した矩形内の画像を保存
・1mキロ程を付与
YOLO11で実装されているトラッキング、計測機能によって個々の枕木のトレースと特定(ユニークなIDの付与)が出来れば、枕木を走行順に並べて、自動的に枕木管理台帳を生成できるかも?!な妄想が膨らみます
物体検出の結果が間違っていないかの照合のためにも、"検出した枕木を1本ごとに保存した画像"があれば、(より精度の高いモデルや人の目による)訂正が可能になります
正確なKPが付与されていれば、どこの何がどのように間違っている・・という情報をトレースすることも可能になります
▼この記事を書いたひと

R&Dセンター 松井 良行
R&Dセンター 技術戦略担当部長。コンピュータと共に35年。そしてこれからも!
おすすめの関連記事
- 【エッジAI】Raspi5でYOLOリアルタイム物体検出チャレンジ!~検出実行編 vol.20
- 【エッジAI】Raspi5でYOLOリアルタイム物体検出チャレンジ!~環境整備編 vol.21
- 【エッジAI】Raspi5+SONY IMX500で30FPS物体検出チャレンジ!~環境整備編 vol.23
- 【エッジAI】Raspi+SONY IMX500で30FPS物体検出チャレンジ!~オリジナルモデル、静止画・ログ保存編 vol.24
機械学習・AIの最新記事
- 【エッジAI】Raspi5+SONY IMX500で30FPS枕木検出チャレンジ!~鉄道技術展2025デモ編 vol.25
- 【エッジAI】Raspi+SONY IMX500で30FPS物体検出チャレンジ!~オリジナルモデル、静止画・ログ保存編 vol.24
- 【エッジAI】Raspi5+SONY IMX500で30FPS物体検出チャレンジ!~環境整備編 vol.23
- 【エッジAI】Raspi5+SONY IMX500で30FPS物体検出チャレンジ!~検出実行編 vol.22