機械学習・AI【物体検出】vol.2 :YOLOv3をNVIDIA Jetson Nanoで動かす

Jetson Nanoとは?

Jetson Nano開発者キット
NVIDIAが2019/03/19にGPUカンファレンスで発表し、6月以降99ドルで提供予定のシングルボードコンピュータ。
小さいながらも128コアのGPUを搭載し、ディープラーニングモデルの実行が可能。
GPUモジュールを、ラズパイのようにUSB、HDMI、GPIOなどの豊富なインタフェースを持つ基盤に取り付け、4GBのメモリを搭載、Ubuntuが動作するようになっているのが、開発者キット
日本国内では、2019/05よりツクモパソコン本店Ⅱ、スイッチサイエンス(マクニカ)で開発者キットの取り扱いを開始。13,000円程度で入手できる。
夢の詰まったパッケージ
この夏、最も熱いシングルボードコンピュータ(エッジコンピュータ)がNVIDIA Jetson Nanoなのだ!Nanoなのだ!(2回復唱すべし)
Jetson Nano+パーツの購入
前述のように、国内ではツクモパソコン本店Ⅱ や スイッチサイエンスでJetson Nanoを取り寄せ購入できます。
本体購入と同時に、下記のパーツを購入することを強くお勧めします。(特に金属ケースはMust Buyです!)
本体:13,000円、ケース:3,800円、microSD:4,000円、ACアダプタ:1,600円、ファン:約4,200円、合計:26,600円
-
Geekworm NVIDIA Jetson Nano用金属ケース、電源およびリセットコントロールスイッチ付きのメタルシェル、Jetson Nano Boardに適用
-
SUCCUL ACアダプター 5V 4A 大手メーカーOEM社製品 センタープラス スイッチング式 最大出力20W 出力プラグ外径5.5mm(内径2.1mm)PSE取得品
-
microSDXC 128GB SanDisk サンディスク Extreme UHS-1 U3 V30 4K Ultra HD A2対応 SDアダプター付 [並行輸入品]
必要なものを一式購入しても3万円以内の圧倒的なコストパフォーマンス。これがJetson Nanoなのだ!Nanoなのだ!(失笑)
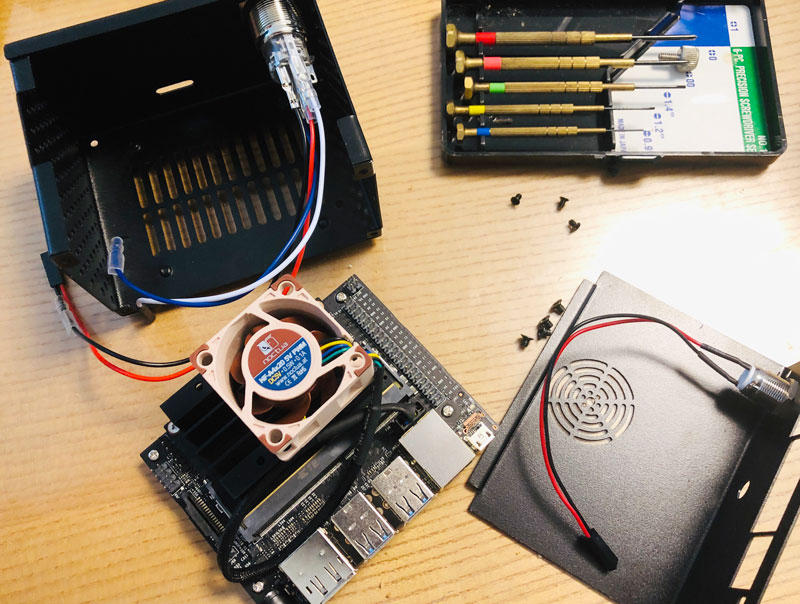
Jetson Nano+パーツの組み立て
電源スイッチ、リセットスイッチ、ファンの接続とジャンパー設定などをここを参考に組み立てます。
組み立てのポイントは下記の通り。
- J48にジャンパーキャップを付ける→micro USB PWR給電を禁止(DC 5V 4AジャックPWRを有効にする)
- J40のAUTO ONの位置にジャンパーキャップを付ける→AUTO ON機能の停止
- 電源制御スイッチはJ40-「ON」ピンに挿入、電源制御スイッチのブルー/ホワイトのケーブルはJ41-「3.3V(1)」と「GND(9)」ピンにそれぞれに挿入する。
- リセットスイッチはJ40-「RST」ピンに挿入する
- ファンの4pinケーブルをコネクタ(イーサネットポートのすぐ後ろ)に接続する
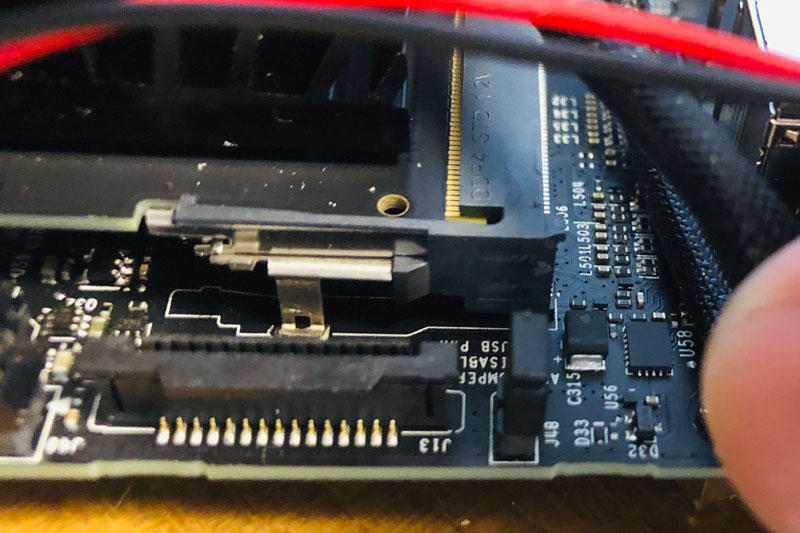
miscoSDカードにJetson Nanoのインストールイメージを準備します。
Write Image to the microSD Card
接続前
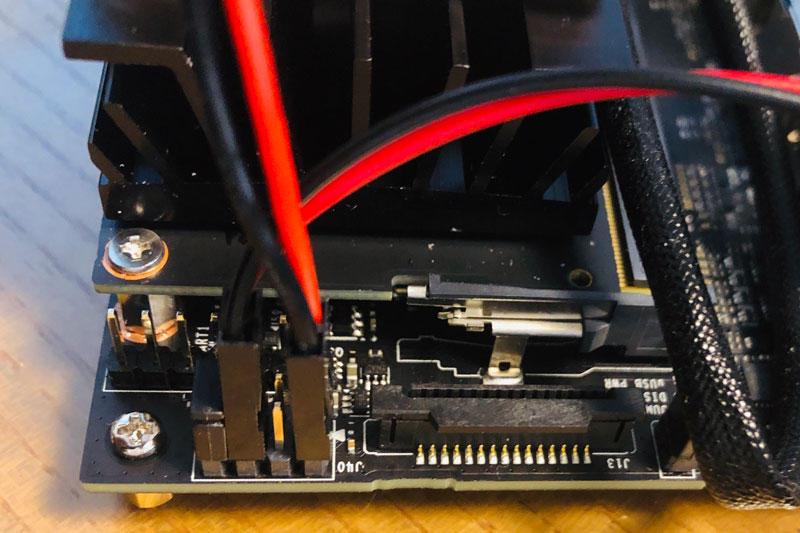
J40にジャンパーピン
J48にジャンパーピン
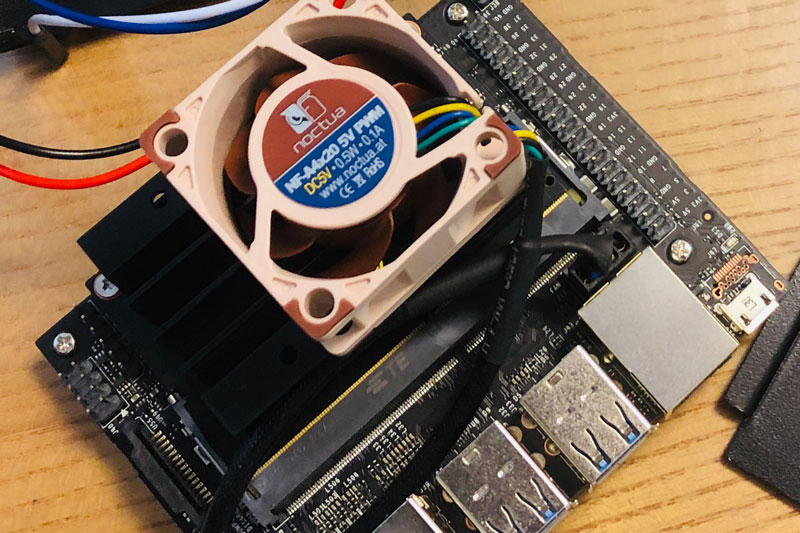
ファンを4Pinコネクタで接続
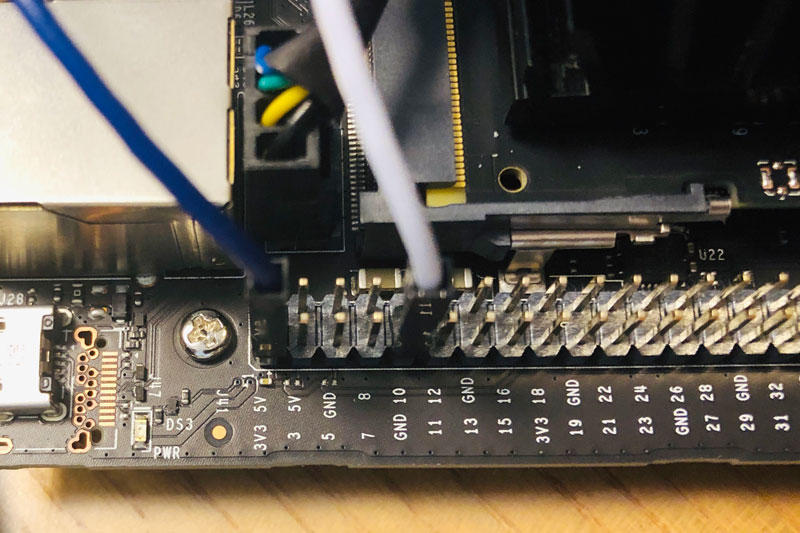
GPIOへの接続
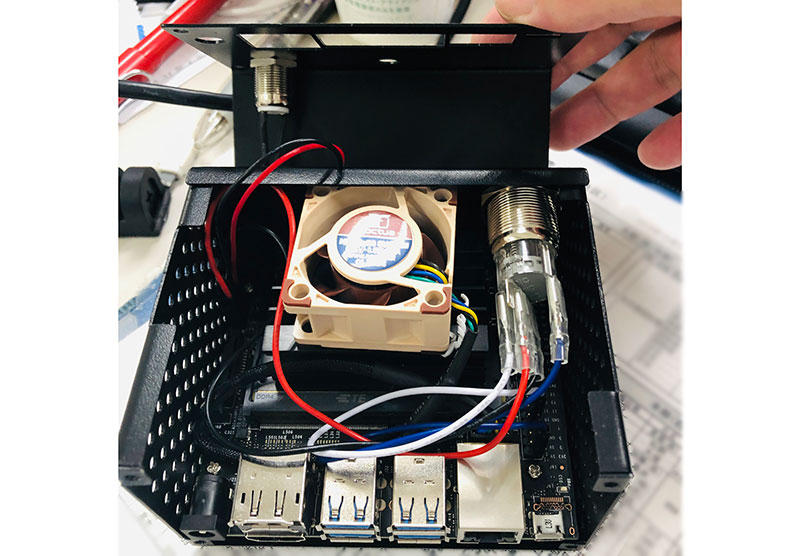
組み立て

microSDの装着

豊富な端子類
工作には半田ごてを握る必要も、コンデンサーを破裂するリスクも無い。電源電圧や逆接続だけ気を付ければ安心安全。これがJetson Nanoなのだ!Nanoなのだ!(スルー)
Jetson Nanoの起動とセットアップ
microSDカードを挿入し、USBポートにキーボード、マウス、HDMIポートにディスプレイ、ACアダプタを接続し、背面の電源ボタンを押すと、Blueのライトが灯り、bootが開始されます。
ウィザードに従って、リージョン、時刻やキーボードの選択をします。キーボードが何か分からなければ、とりあえずJapanese 109キーボードでOKです。

電源ON
日本語入力設定
テキスト入力設定の"使用する入力ソース"で日本語(Mozc)(IBus)を追加し、最優先(リストの最上段)に設定する。
オーバークロック設定とSwapファイル作成
参考:Jetson Nano買ったのでdarknetでNightmareとYOLOを動かすまで
- Full Power化
sudo nvpmodel -m 0
sudo jetson_clocks
- SwapFile作成
git clone https://github.com/JetsonHacksNano/installSwapfile
cd installSwapfile
./installSwapfile.sh
Darknetのインストール
- ダウンロード
git clone https://github.com/AlexeyAB/darknet darknet
cd darknet
- モデルのダウンロード
Pre-Trained Modelを~/darknetにダウンロードしておきます。
恐らく、Jetson Nanoでカメラと共に使うならTinyモデルの方です。ダメ元でやってみる用にYOLOv3、YOLOv3-SPPも念のため落としておきましょう。
- Makefileの修正
GPU,CUDNN,OPENCV,LIBSOを1に変更
Tegra X1 (Jetson NanoのGPU)を探してコメントを取り有効化
ARCH= -gencode arch=compute_30,code=sm_30 \
-gencode arch=compute_35,code=sm_35 \
-gencode arch=compute_50,code=[sm_50,compute_50] \
-gencode arch=compute_52,code=[sm_52,compute_52] \
# -gencode arch=compute_61,code=[sm_61,compute_61]
# For Jetson TX1, Tegra X1, DRIVE CX, DRIVE PX - uncomment:
ARCH= -gencode arch=compute_53,code=[sm_53,compute_53]
- .bashにnvccのPATHを設定。
export PATH=/usr/local/cuda/bin:${PATH}
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:${LD_LIBRARY_PATH}
- いざ!make
makeを実行します。
ダラーっと長い長いスクロールが始まりますが、気長に待ちます。途中、warningとかがいっぱい出来るかもしれません。
色々と端折りますが、最終的に./darknetとコマンドを打って、
usage: darknet
みたいな素っ気ない応答が帰ってくれば、(恐らく)ちゃんとmakeが出来ています。
普通にUbuntuが起動して、必要なものはすでに入っているオールインワンディープラーニングマシン。これがJetson Nanoなのだ!Nanoなのだ!(再度復唱すべし)
YOLOv3の動作確認
静止画で動作確認
YOLOv3モデルを使って、サンプルの静止画を認識させてみます(モデルの読み込みがズッシリと重いです。気長に待ちましょう)。
下記のコマンドを打ちます
./darknet detector test cfg/coco.data cfg/yolov3.cfg yolov3.weights
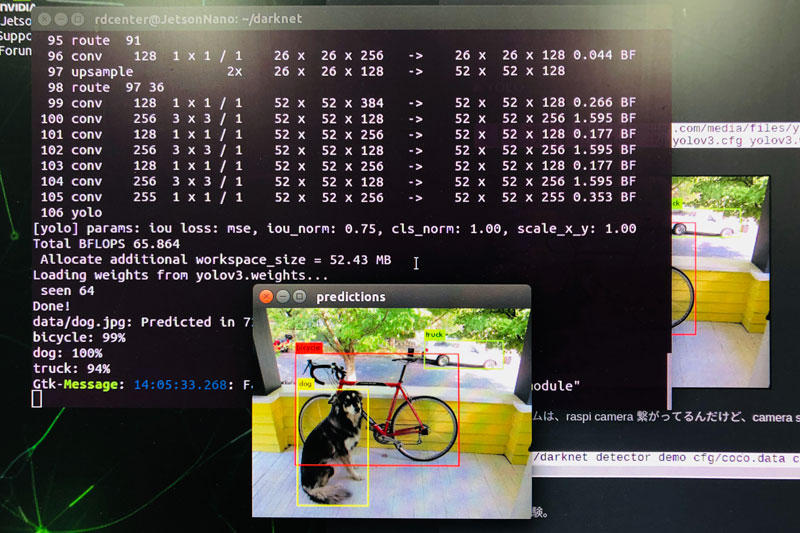
動作テスト:YOLOv3で静止画の認識
USBカメラを接続して動作確認
USBポートにカメラを接続します。

下記のコマンドを打ちます
./darknet detector demo cfg/coco.data cfg/yolov3-tiny.cfg yolov3-tiny.weights -c 0
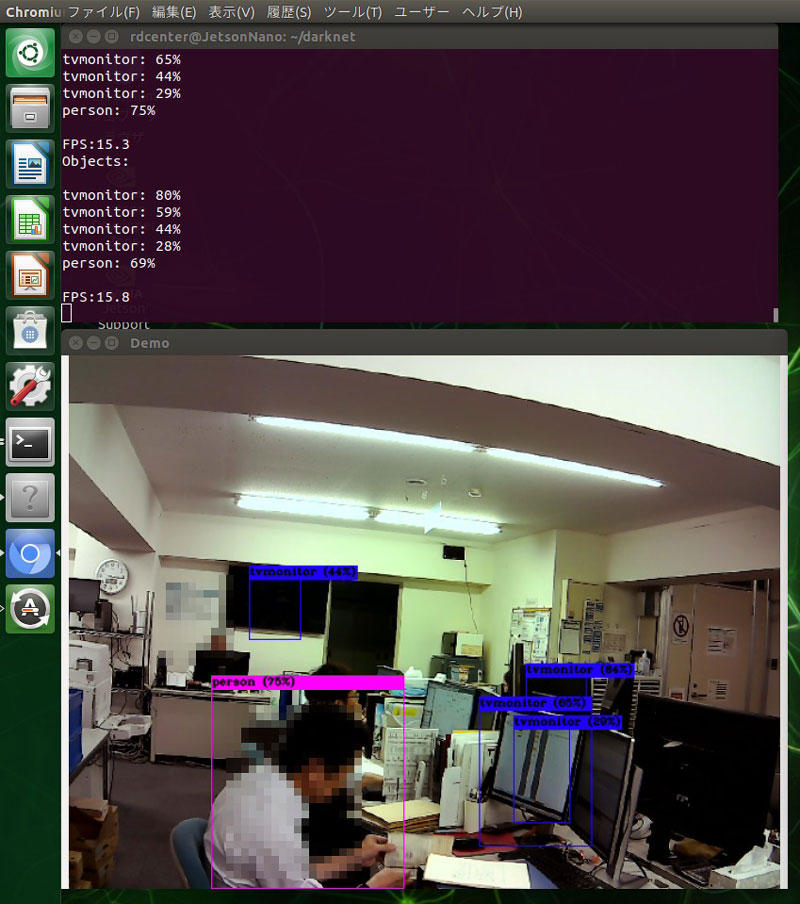
USBカメラによるリアルタイム物体検出

USBカメラによるリアルタイム物体検出
連続稼働するとどうなる?
USBカメラで物体検出をし続けて6時間。Nano本体が熱くなってきました。
内部の温度を測るなんてこともできるんですね〜。
$ cat /sys/devices/virtual/thermal/thermal_zone*/temp64000
59500
54500
55000
100000
57250
1000で割ると温度になるみたいなので、大体55-60℃位です。まだ壊れる温度ではないようです。
温度がわかったところで、今度はファンの回転数を制御してみます。(温度によって自動的に制御してくれたらいいのに)
255が最大値のようなのでここは控えめに60%=153にしてみます。
sudo sh -c 'echo 153 > /sys/devices/pwm-fan/target_pwm'cat /sys/devices/pwm-fan/target_pwm
153
ファンの回転をフルにして、数分放置したら・・・
$ cat /sys/devices/virtual/thermal/thermal_zone*/temp61500
57000
52500
53000
100000
54750
2℃位下がったようです。
面白いので、事務所のサーキュレータに当ててみました。
$ cat /sys/devices/virtual/thermal/thermal_zone*/temp60000
56000
51500
51000
100000
53250
さらに1℃位下がりました。
それじゃあ・・ということで、実行していたYOLOを止めます。
$ cat /sys/devices/virtual/thermal/thermal_zone*/temp44500
40000
35000
35500
100000
37250
もう、みるみる温度が下がって、最終的には15℃位の温度差になりました。やはりGPUがヒーターだったんだなぁと実感した次第です。
YOLOv3 Tinyモデルで640x480@15fpsで動作し、完全に実用範囲内。YOLOv3モデルでは、辛うじて1-2fps程度で動作しましたが、リアルタイムというには無理があるレベルでした。
・・・とはいえ、わずか2万円でYOLOv3が動作するシングルボードコンピュータを入手できるなんて素晴らしいと思います。 次は、Nanoの20倍の処理性能があるといわれている"Xavier(ザビエル)"を試してみたいです。
▼この記事を書いたひと

R&Dセンター 松井 良行
R&Dセンター 室長。コンピュータと共に35年。そしてこれからも!
おすすめの関連記事
- 【物体検出】vol.9 :YOLOv3をNVIDIA Jetson AGX Xavierで動かす
- 【物体検出】vol.5 :YOLOv3のファンクションと引数のまとめ(私家版)
- 【物体検出】vol.4 :YOLOv3をWindows⇔Linuxで相互運用する
- 【物体検出】vol.3 :YOLOv3の独自モデル学習の勘所
機械学習・AIの最新記事
- 【オープンイノベーション】vol.42:YOLOv11, YOLOv12をGeForce RTX 4090で動かす
- 【オープンイノベーション】vol.28:鉄道保線用物体検出AI「遊間」モデル作成
- 【オープンイノベーション】vol.26:何がどう変わった?Ultralytics YOLOv8のレビュー
- 特許を取得しました "分布図作成装置、分布図作成方法、及び、プログラム"(特許6970946)"
お問い合わせ
ご意見・ご質問などお気軽にお問い合わせ下さい。ナカシャクリエイテブ株式会社
●富士見事務所 TEL : 052-228-8733 FAX : 052-323-3337
〒460-0014 愛知県名古屋市中区富士見町13−22 ファミール富士見711 地図
交通部 R&Dセンター



![]()

![]()